串口学习
用到新器件:
USB转TTL
| USB 转 TTL 模块 GND | 单片机 GND 口 |
|---|---|
| USB 转 TTL 模块 TXD | PA10 |
| USB 转 TTL 模块 RXD | PA9 |
| USB 转 TTL 模块 USB 口 | 电脑 USB |
- 并行通信和串行通信 所谓通信,其实说白了就是处理器与外部设备之间的交流,就像电脑连接键盘、鼠标或打印机之类。计算机领域的通信一般有两种方式,即并行通信和串行通信。这两种方式的优缺点对比如下:
并行通信
-传输原理:数据各个位同时传输。
-优点:速度快
-缺点:占用引脚资源多
串行通信
-传输原理:数据按位顺序传输。
-优点:占用引脚资源少
-缺点:速度相对较慢
串行通信的分类
按照数据的传送方向可以分为:
单工:数据传输只支持数据在一个方向上传输
半双工:允许数据在两个方向上传输,但是,在某一时刻,只允许数据在一个方向上传输,它实际上是一种切换方向的单工通信;
全双工:允许数据同时在两个方向上传输,因此,全双工通信是两个单工通信方式的结合,它要求发送设备和接收设备都有独立的接收和发送能力。
关于 UART 和 USART:
UART 串口通信协议全称叫做通用异步收发传输器 (Universal Asynchronous Receiver/Transmitter)、
USART 串口通信协议全称叫做通用同步异步收发传输器(universal synchronous asynchronous receiver and transmitter)
一般的单片机 UART 和 USART 使用方式是一样的,都使用异步模式,所以我们 初期学习 stm32 串口的使用,学的就是 uart 类型的异步串口通信。
TTL:TTL 电平信号规定,+5V 等价于逻辑“1”,0V 等价于逻辑“0”(采用二进制来表示数据时)。这样的数据通信及电平规定方式,被称做 TTL(晶体管-晶体管逻辑电 平)信号系统。TTL 设备使用的电压水平普遍为 5V 或 3.3V,目前咱们学习单片机TTL电压是3.3V,故把跳线帽中 VCC和3.3连一起。
.在使用前要安装上CH340驱动。
TXD 发送数据 Transmit(tx) Data 简写形式 RXD 接受数据 Receive(rx) Data 简写形式 TXD 和 TX,RXD 和 RX 其实是一个意思。所以要这样交叉连,TTL 模块的 TXD就相当于电脑的发送接口,那当然就要连 STM32 的接收接口,也就是 RX,一 端发送,另一端接收。 另一条线路同理。
现在咱们了解一下波特率:
波特率(Baud Rate)单位 bps – 每秒传送的二进制位数 bit Per Second.。9600bps 就是每秒传输 9600 位。 因为一个字节是 8 个 bit,而一个字节通常可以表达一个 ASCII 码,比如一个英 文字母,所以:9600 的波特率的信道(信号的传递通道),理论上每秒可以传 输 9600/8 个英文字母的数据量,也就是 1200 个字节,大约 1.2KB。 (1 字节=1B=8 位=8bit)。
p.s. 如果 1.2KB/s 的网速,可以想象通信有多慢,所以 uart 通信并不是高速通信。
相关寄存器:
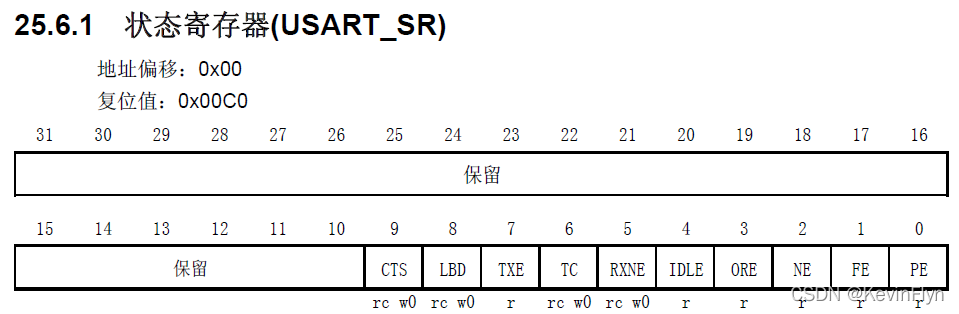
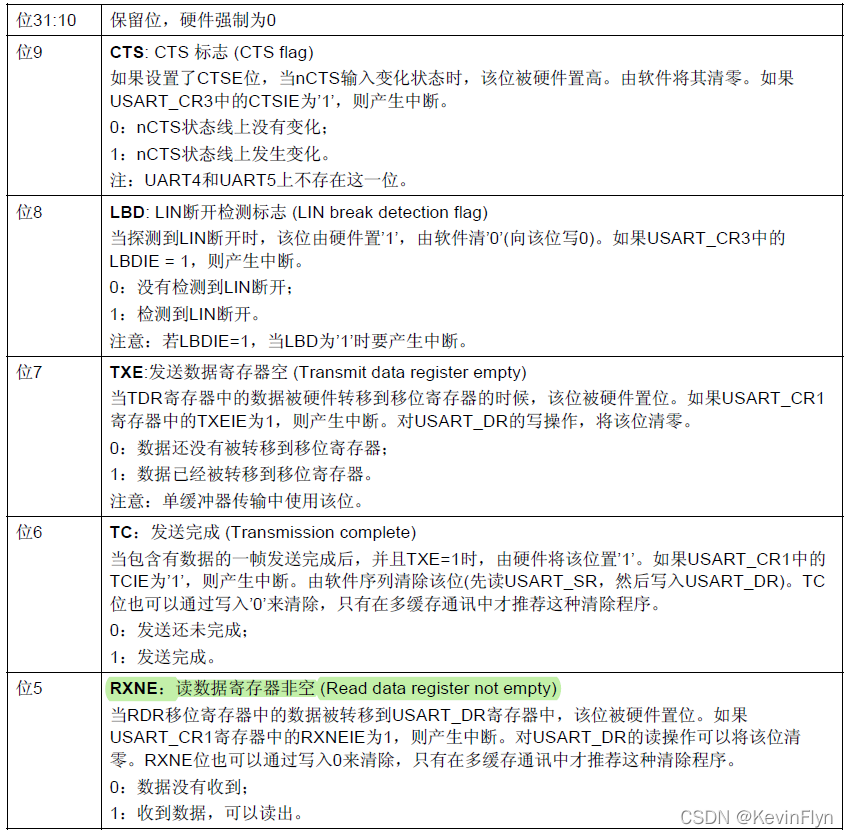
USART_SR状态寄存器
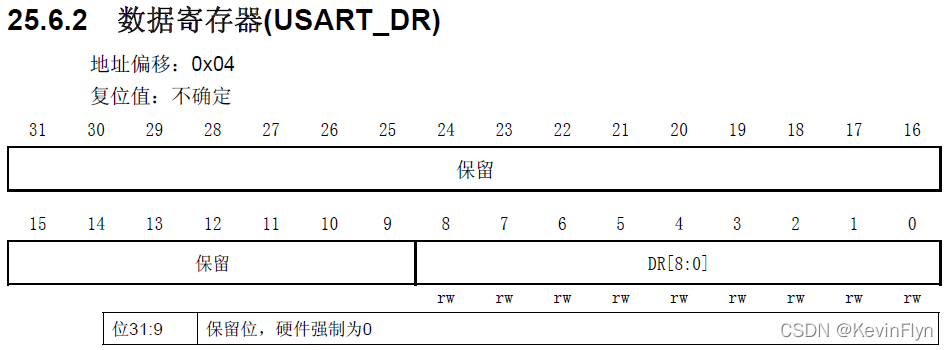
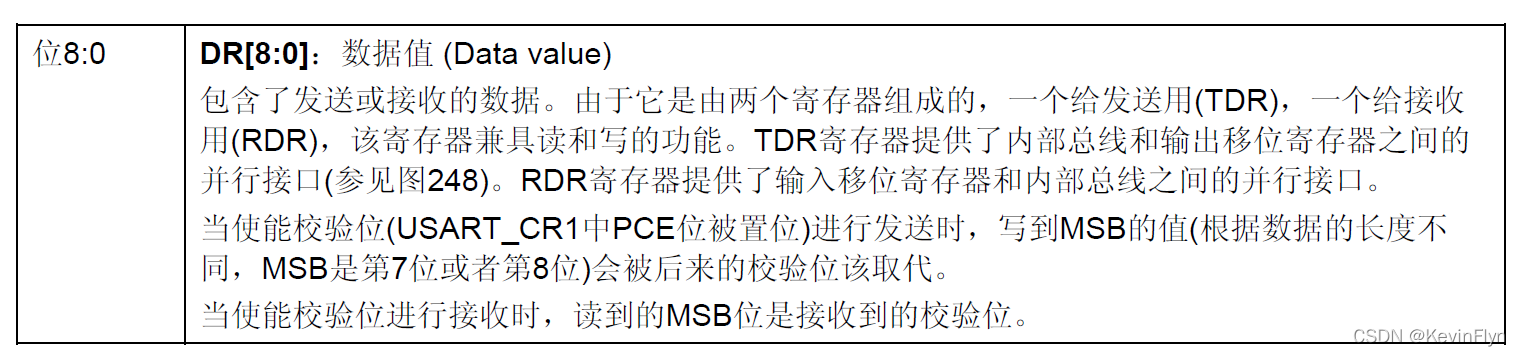
USART_DR数据寄存器
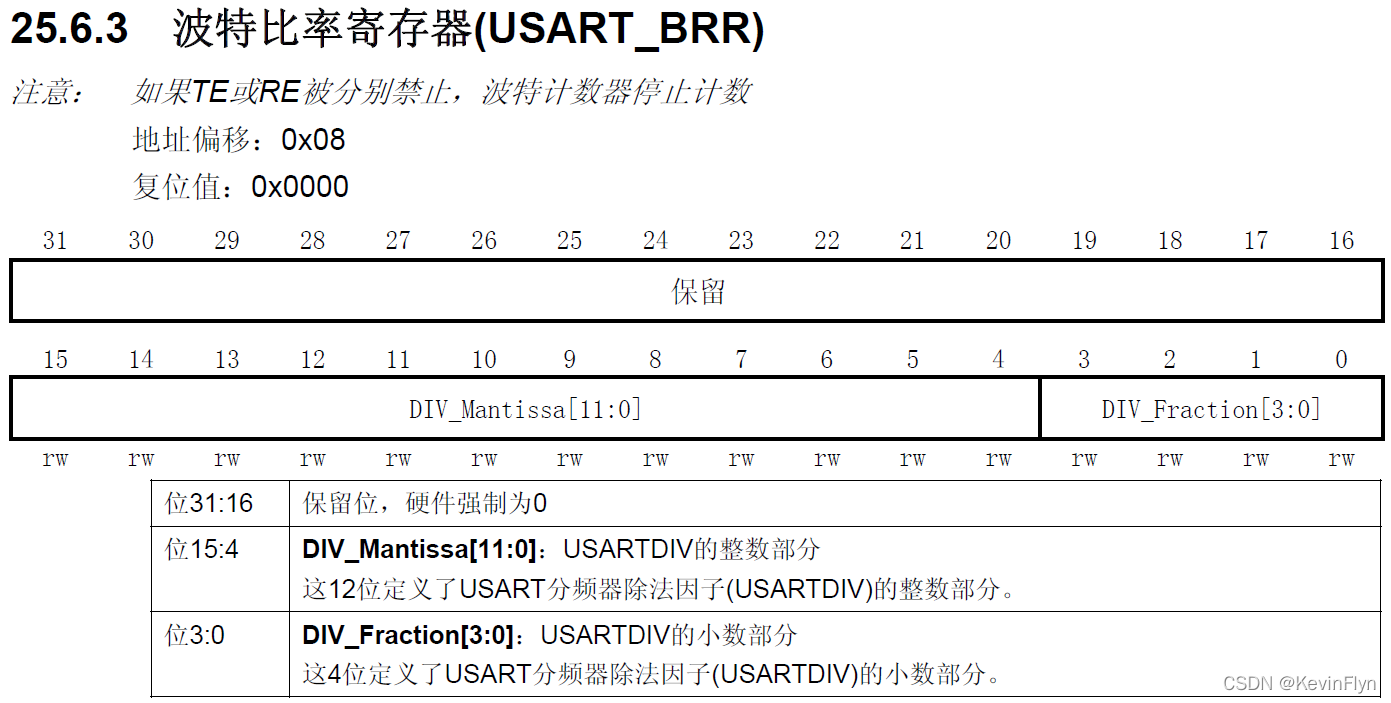
USART_BRR波特率寄存器
void uart_init(u32 bound)
{
//GPIO端口设置 PA9--TXD PA10--RXD
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART|RCC_APB2Periph_GPIOA, ENABLE); //使USART1,GPIOA时钟
//USART1_TX GPIOA.9---输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.9
//USART1_RX GPIOA.10初始化---输入
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;//PA10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.10
//Usart1 NVIC 配置 串口接收信息时会频繁进入串口接受中断,为了不影响其他程序正常运行,一般把中断两位优先级调最低。
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
//USART 初始化设置
USART_InitStructure.USART_BaudRate = bound;//串口波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式 还有九位,一般用八位。
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制 --一般没用过
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART1, &USART_InitStructure); //初始化串口1
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启串口接受中断
USART_Cmd(USART1, ENABLE); //使能串口1
}
//重定义fputc函数 ---重定向printf,直接复制即可
int fputc(int ch, FILE *f)
{
while((USART1->SR&0X40)==0);//循环发送,直到发送完毕
USART1->DR = (u8) ch;
return ch;
}
/*如果使用多个串口只需修改USART1即可,
ps .USART1->USART3 */
//故如果要打印自己姓名只需在main中printf即可



