PID教程
PID参数示意
一、学习目的
PID(比例-积分-微分)是一种经典的闭环控制算法,其采用反馈的控制回路机制,用于自动调整系统的输出以接近设定点,,广泛用于工业控制系统和需要连续调制控制的其他各种应用中。它有三个组成部分:比例项Kp(根据当前误差调整输出)、积分项Ki(减小稳态误差)、微分项Kd(减小振荡和响应时间)。通过调整这些部分的权重,PID控制器能够适应不同的系统需求,实现稳定而精确的控制。无论是温度控制、速度调节还是位置控制,PID都是一个重要的工具。
二、PID简介
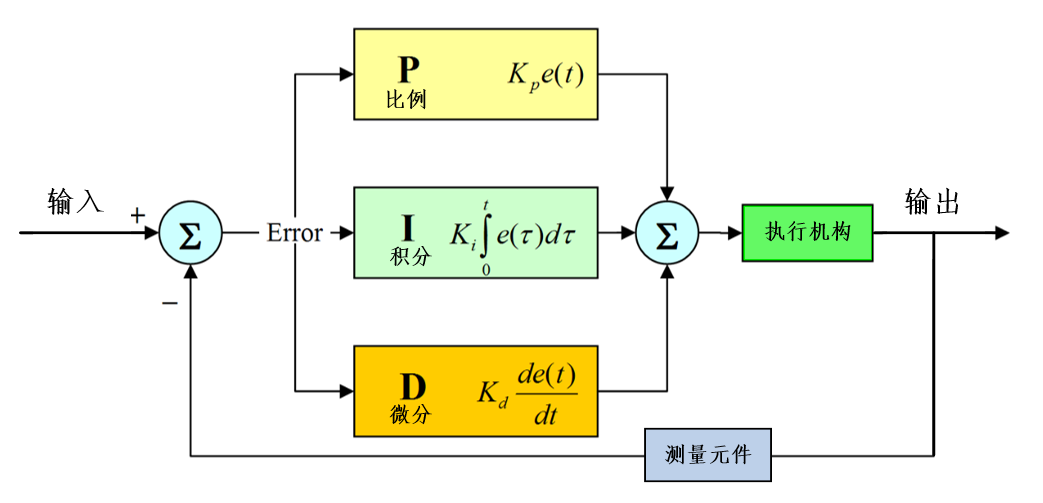
PID.png
Kp:比例环节是为了加快响应速度快速达到稳定,能减少误差但不能消除误差。
Ki:积分环节是为了消除稳态误差,只要系统有误差他就一直积分,稳态后不会出现误差,过大会超调。
Kd:微分环节预测误差的趋势,减少超调量来克服振荡,使系统稳定性提高。
三、位置式PID
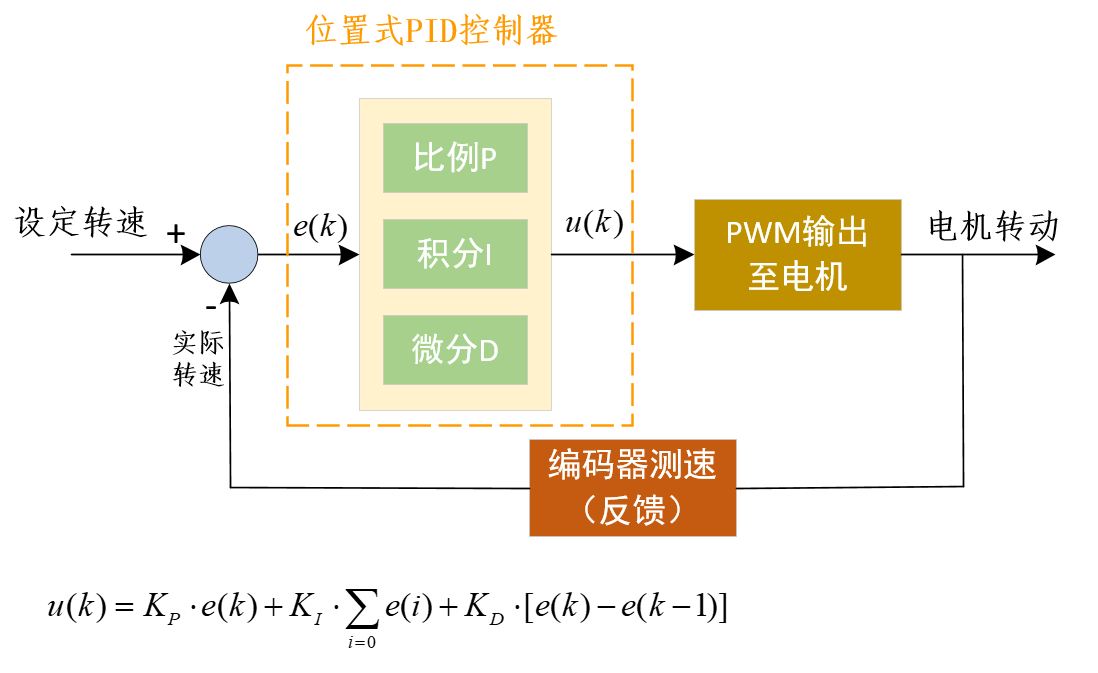
PID.png
- 比例P:e(k) (此次误差)
- 积分I:∑e(i) (误差的累加)
- 微分D:e(k) - e(k-1) (此次误差-上次误差)




